En el anterior artículo, vimos diferentes configuraciones que podía realizar la mano para el agarre y la manipulación, y cómo su estructura y biomecánica tan compleja que posee permite realizar multitud de movimientos, adaptaciones y ajustes posturales, que nos permiten percibir la forma de los objetos, manipularlos y adecuarlos a las diferentes formas y volúmenes.
También mencionamos la importancia que adquiere la musculatura intrínseca de la mano en el soporte postural y cómo proporciona estabilidad para realizar las diferentes configuraciones de prensión.
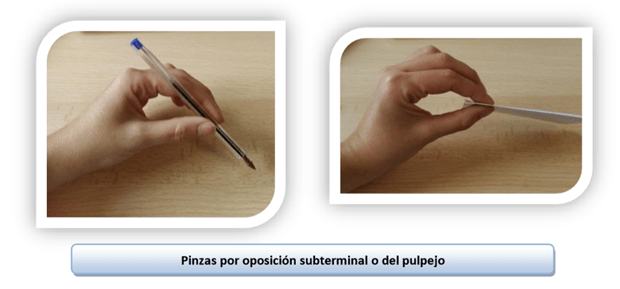
Siguiendo la clasificación clásica de A.I. Kapandji, la prensión la podíamos dividir en tres tipos: las presas (también denominadas pinzas), las presas con la gravedad y las presas con acción. En el anterior artículo, vimos de forma más detallada las pinzas bidigitales y pluridigitales. En éste vamos a ver las presas palmares y las presas con la gravedad.
Las presas palmares es un tipo de presa en el que además de los dedos, interviene la palma de la mano. Dependiendo de si interviene o no el pulgar, pueden ser de dos tipos:
- Prensión digitopalmar: en este tipo de prensión no interviene el pulgar, es la palma de la mano la que se opone a los cuatro últimos dedos. Este tipo de prensión se suele utilizar para sujetar un objeto con poco diámetro (3-4 cm), aunque también se puede utilizar para sujetar un objeto más voluminoso como puede ser un vaso. Eso sí, cuanto mayor diámetro tenga el objeto, menos firme será su sujeción.

- Prensión palmar con la totalidad de la palma: en este tipo de prensión, la mano se enrolla entorno a los objetos cilíndricos. Es una prensión de fuerza que se utiliza para el agarre de objetos pesados y relativamente voluminosos. El volumen del objeto va a condicionar la fuerza de prensión.

Existen dos tipos de prensión palmar:
- Presa palmar cilíndrica: utilizada para objetos de diámetro importante. A
mayor diámetro, menos firme será la presa. Además, el volumen del objeto
exige máxima libertad de separación de la primera comisura. - Presa palmar esférica: este tipo de presa puede implicar tres, cuatro o cinco
dedos. Cuando intervienen tres o cuatro dedos, el último dedo implicado contactan por la cara lateral externa con el objeto, constituyendo así un tope interno, reforzado por los dedos restantes. Este tope, se opone a la presión del pulgar, de modo que el objeto queda bloqueado distalmente por los dedos que establecen contacto palmar con el objeto. La presa palmar esférica pentadigital, es una presa más simétrica que las anteriores, en ella, todos los dedos contactan con el objeto por su cara palmar y el pulgar se opone al dedo anular.
En las presas con la gravedad, como su nombre indica, la acción de la gravedad es indispensable. En ellas, la mano sirve de soporte al realizar acciones como sujetar una bandeja, al ahuecar la mano para contener agua, harina o arroz… Este tipo de presas, requiere de una supinación íntegra, ya que, sin ella, la palma de la mano no puede orientarse hacia arriba para desempeñar su función.

En el siguiente artículo, veremos más configuraciones que puede realizar la mano durante el agarre y la manipulación. Si te ha gustado este artículo, no te pierdas la próxima semana nuestra última parte de esta colección de posts!!!
Yolanda Carretero Serrano. TO especializada en Neurorrehabilitación.
¿Quieres especializarte en Terapia de la Mano Neurológica? Abierto plazo de inscripción 2020-2021!!!